Project Pages
DITTO→
2026Dexterous Interface for Transparent TeleOperation
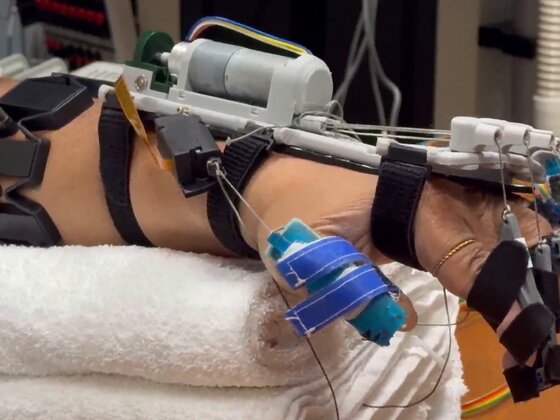
ReactEMG‑Stroke→
BioRob 2026Healthy-to-Stroke Few-Shot Adaptation for sEMG-Based Intent Detection
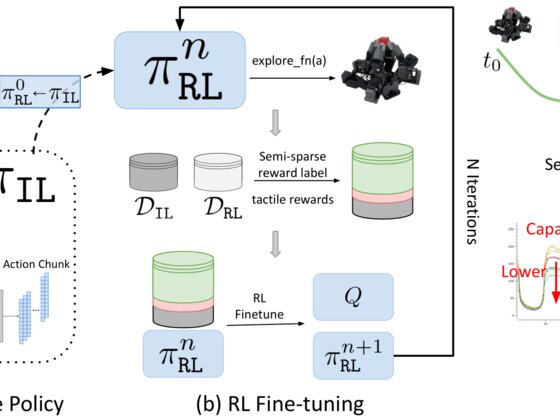
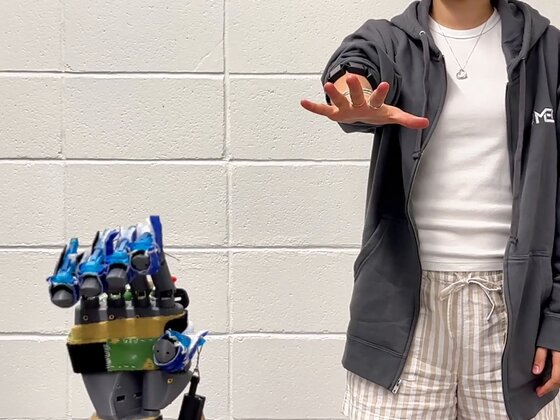
SpikeATac→
ICRA 2026A Multimodal Tactile Finger with Taxelized Dynamic Sensing for Dexterous Manipulation
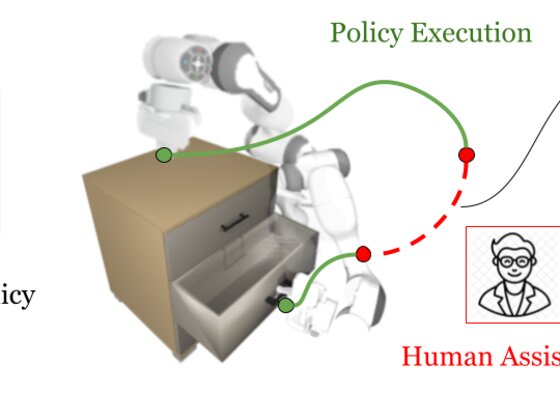
Uncertainty Comes Free→
ICRA 2026Learning Human-in-the-Loop Policies with Diffusion Models
ReactEMG→
2025Stable, Low-Latency Intent Detection from sEMG via Masked Modeling
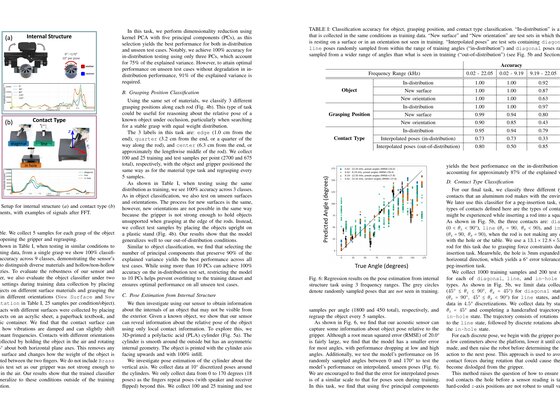
VibeCheck→
IROS 2025Active Acoustic Tactile Sensing for Contact-Rich Manipulation
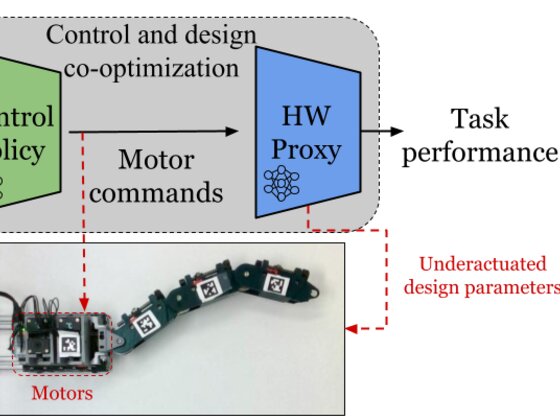
MORPH→
RA-L 2024Design Co-optimization with Reinforcement Learning via a Differentiable Hardware Model Proxy
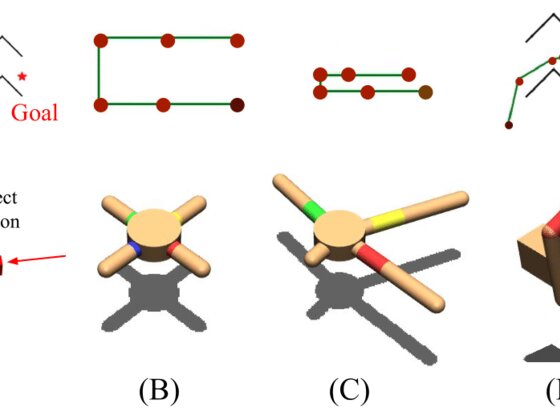
TentaMORPH→
IROS 2024Task-Based Design and Policy Co-Optimization for Tendon-Driven Underactuated Kinematic Chains
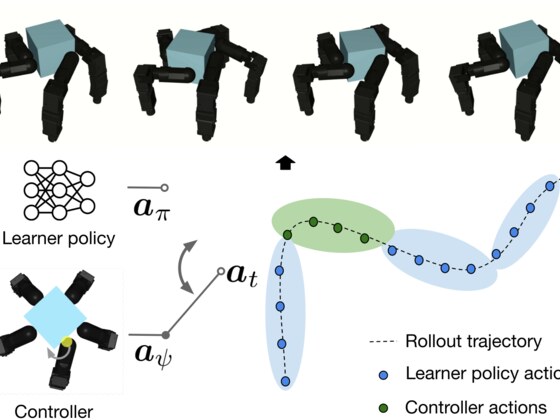
Guided Exploration→
ICRA 2024Dexterous In-Hand Manipulation by Guiding Exploration with Simple Sub-Skill Controllers
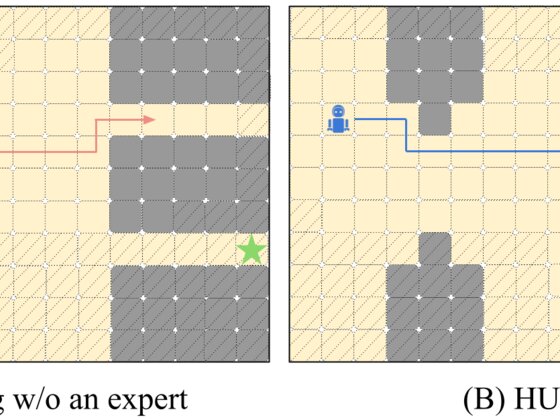
HULA→
ICRA 2024Decision Making for Human-in-the-Loop Robotic Agents via Uncertainty-Aware Reinforcement Learning
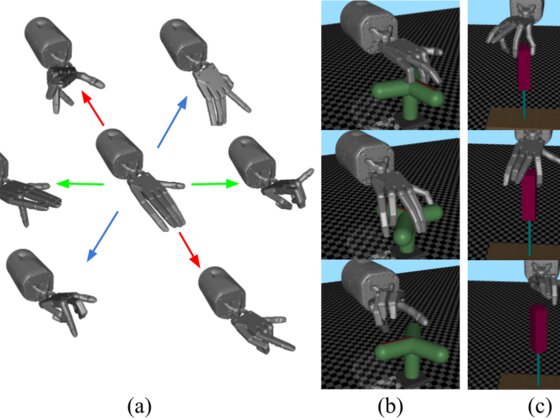
SBRL→
RSS 2023Sampling-Based Exploration for Reinforcement Learning of Dexterous Manipulation
DiscoSyn→
RA-L 2022Discovering Synergies for Robot Manipulation with Multi-Task Reinforcement Learning
Finger-Gaiting→
ICRA 2022On the Feasibility of Learning Finger-Gaiting In-Hand Manipulation with Intrinsic Sensing
DSSM→
ICRA 2022Adaptive Semi-Supervised Intent Inferral to Control a Powered Hand Orthosis for Stroke
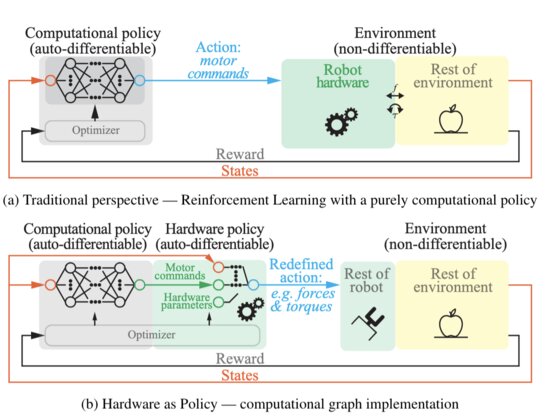
HWasP→
CoRL 2020Hardware as Policy: Mechanical and Computational Co-Optimization using Deep Reinforcement Learning